自动驾驶介绍、应用、前景
- 1 介绍
- 1.1 定义
- 1.2 作用
- 1.3 发展历程
- 1.4 分类
- 23年初竞争格局
- 1.5 顾虑
- 1.6 前景
- 2 产业链现状
- 2.1 芯片
- 2.2 仿真
- 3 技术路线
- 3.1 是否交互
- 3.1.1 单车智能
- 3.1.2 车路协同
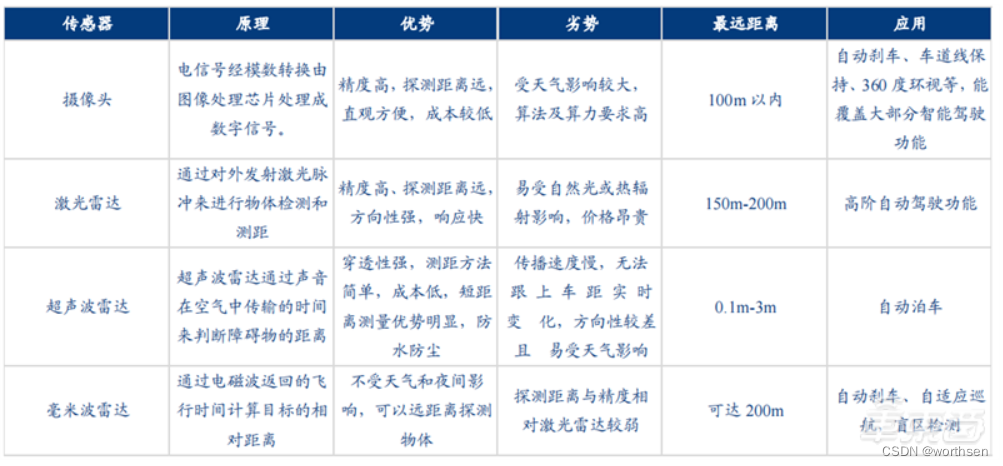
- 3.2 主传感器区分
- 3.2.1 纯视觉
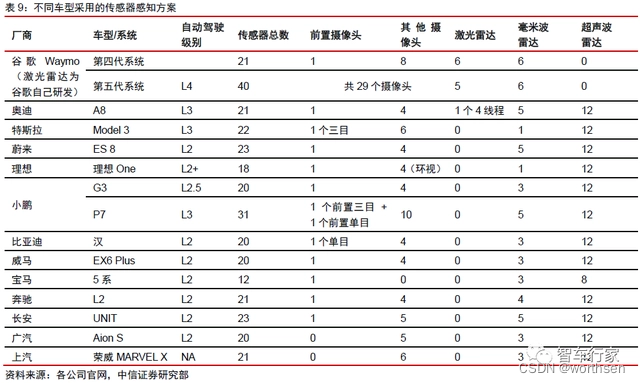
- 3.2.2 混合传感器
- 3.3 前装还是后装
- 3.3.1 前装
- 3.3.2 后装
- 4 相关技术
- 4.0 技术分类
- 4.1 感知
- 4.1.1 激光雷达
- 4.1.2 毫米波雷达
- 4.1.3 相机
- 4.2 决策
- 4.3 执行
- 4.4 系统
- 4.4.1 操作系统简介
- 4.4.2 汽车各模块分类以及对操作系统的要求
- 分类
- 要求
- 4.x ROS(Apollo)
- 历程
- 4.x 车路协同
- 4.x 智能座舱
- 4.x 车载以太网
- 需求
- 线束
- 4.x HUD
- 5 具体功能
- 车道偏离预警系统LDWS( Lane departure warning system)
- 车道保持辅助系统LKS (Lane Keeping System)
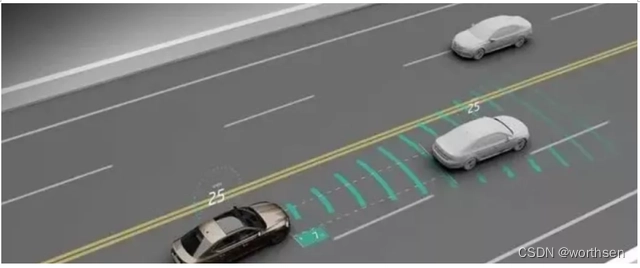
- 自适应巡航系统ACC(Adaptive Cruise Control)
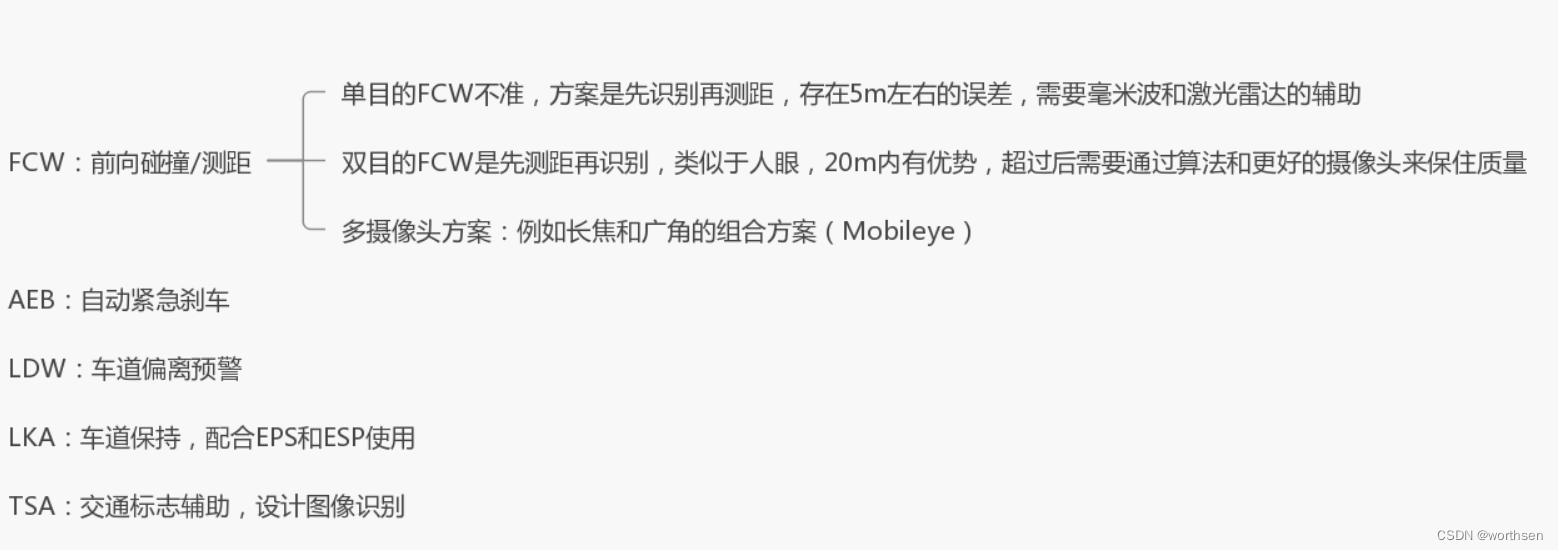
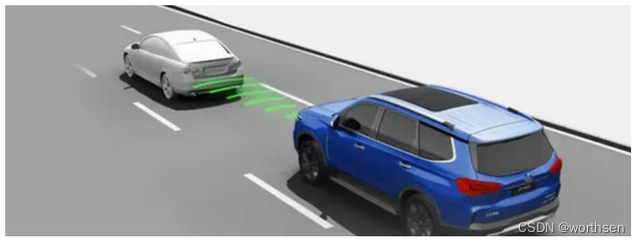
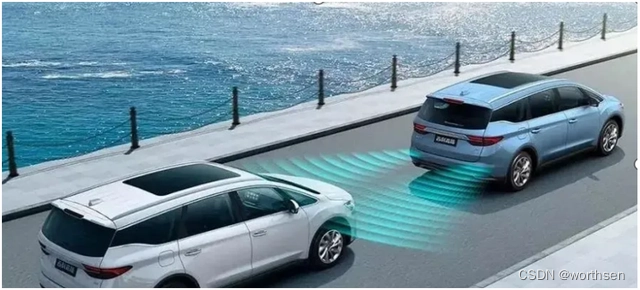
- 前碰撞预防系统FCW (Forward Collision Warning)
- 自动泊车系统APA(Automatic Parking Assist)
- 全景式监控影像系统AVM(Around View Monitor)
- 盲点监测系统BSD( Blind Spot Detection)
- 驾驶员疲劳预警系统DFM(Driver Fatigue Monitor System)
- 自适应灯光控制ALC(Adaptive Light Control)
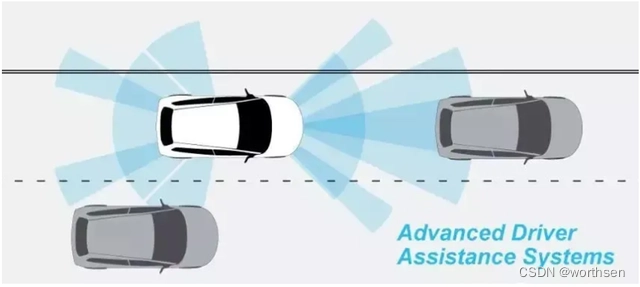
- 6 ADAS汽车
- 参考
1 介绍
行业发展太快,国内研发追超欧美同行时,教育行业的人没有及时更新知识,这导致流水线出来的学生与公司人才需求脱钩。比如,电子信息工程专业,学校里教的proteus99,实际公司研发用的是AD,用的是Allegro。车辆专业,学校教的燃油汽车组成啥的,实际社会新能源汽车普及,智能驾驶迅猛推进。
1.1 定义
智能驾驶与无人驾驶是不同概念,智能驾驶更为宽泛。它指的是机器帮助人进行驾驶,以及在特殊情况下完全取代人驾驶的技术。无人驾驶,就是汽车自主行驶。
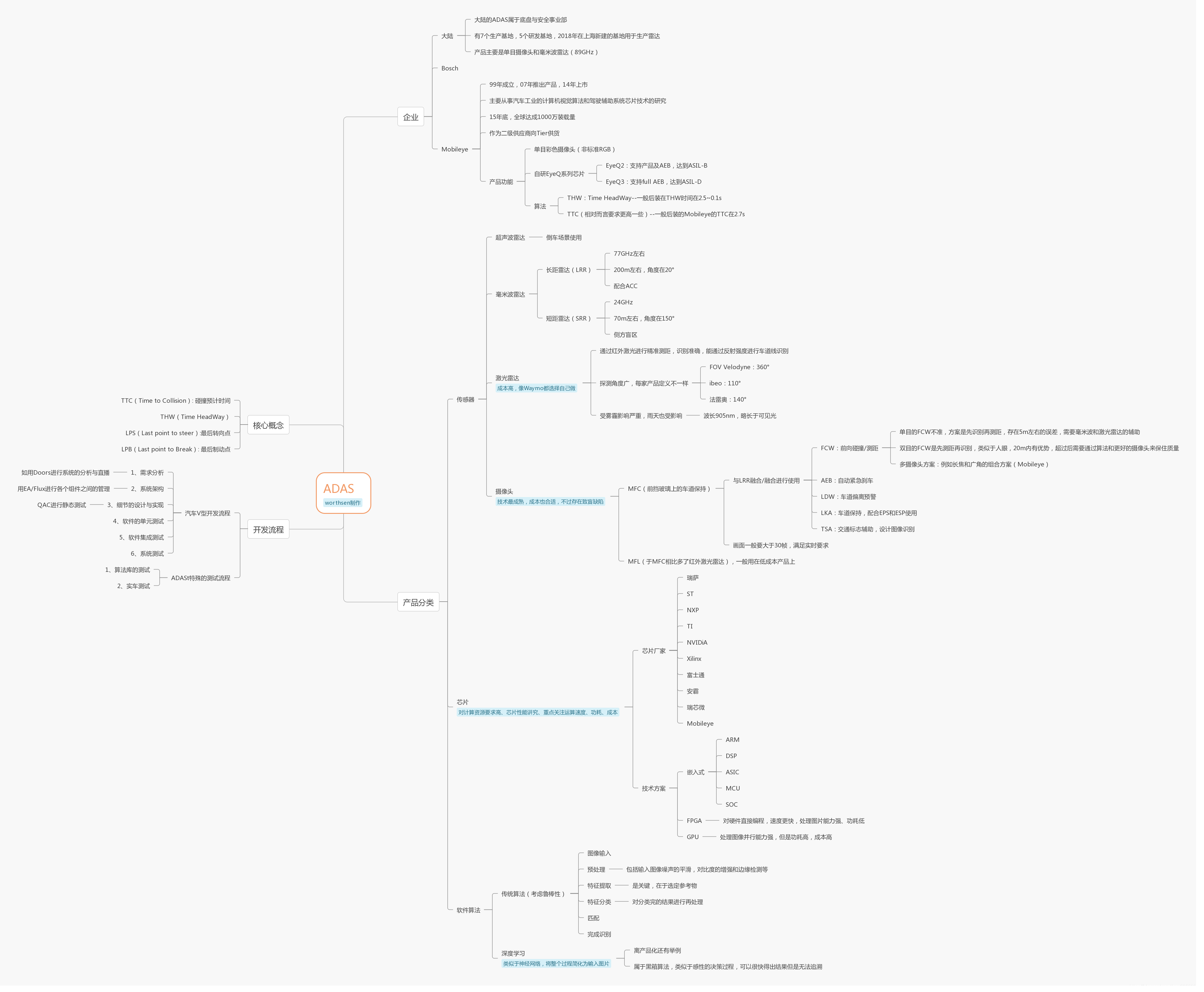
目前智能驾驶,无人驾驶,都归为ADAS(advanced driver-assistance system),只不过ADAS分为5个等级来区分智能水平。

1.2 作用
- 减少事故
由于大多数道路事故都是人为错误造成的,ADAS 可以通过最大限度地减少人为错误来减少道路死亡事故。并线提醒功能,能有效减少后面和侧面汽车追尾;自适应巡航功能,能有效减轻高速行驶中的疲劳;前向碰撞功能,能有效较少因为前车急刹车导致的追尾事故。 - 提高社会效率
事故减少,道路更顺畅,行车更快。 - 解放人类
1.3 发展历程
- 20世纪50年代开始,西方发达国家就开展了地面无人驾驶车辆的研究。
- 【第一阶段】在20世纪80年代之前,受限于硬件技术、图形处理和数据融合等关键技术发展的滞后,地面无人驾驶车辆侧重于遥控驾驶。
- 【第二阶段】20世纪80年代以后,随着自主车辆技术及其他相关技术的突破性进展,地面无人驾驶车辆得以进一步发展,出现了各种自主和半自主移动平台。但是由于受定位导航设备、障碍识别传感器、计算控制处理器等关键部件性能的限制,当时的无人驾驶车辆虽然在一定程度上实现了自主行驶,但行驶速度低,环境适应能力弱。
- 【第三阶段】20世纪90年代以来,由于在计算机、人工智能、机器人控制等技术方面的突破,半自动型地面无人驾驶车辆得到了进一步发展。部分地面无人驾驶车辆参与了军事实战,验证了地面无人驾驶车辆的作战能力,这使人们看到了地面无人驾驶车辆的发展前景,大大激发了各国研发地面无人驾驶车辆的热情,也掀起了研究高潮。在军事需求的推动下和技术发展的激励下,美国、德国、意大利等国在无人驾驶车辆技术方面走在了全世界的前列。进入21世纪后,随着物理计算能力的大幅度提升、动态视觉技术的快速发展以及人工智能技术迅猛发展,路线导航、障碍躲避、突发决策等关键技术得到解决,无人驾驶技术取得了突破性进展。
- 18年鱼龙混杂。当时可谓是,阎王爷面前烧报纸–糊弄鬼的。任何行业都会经历这个阶段。
18年–加安防摄像头

18年–谷歌子公司 waymo

- 2021年,搭载华为Hi解决方案的极狐阿尔法S在无人驾驶的状态下在上海闹市区自动驾驶,躲避道路上的车辆行人及障碍物。震动同行。
- 2021年,很多车开始具备L2功能。并且和传统汽车开始拉开代差。没有自适应巡航,360全景,车道保持等功能,依然是指针仪表盘的汽车在具备自适应巡航,360全景,车道保持,智能显示屏等功能汽车面前,如同老年机在智能手机面前一般。


- 2022年,L2+级别的车型开始增多。提供智能驾驶方案的公司,方案开始成熟。
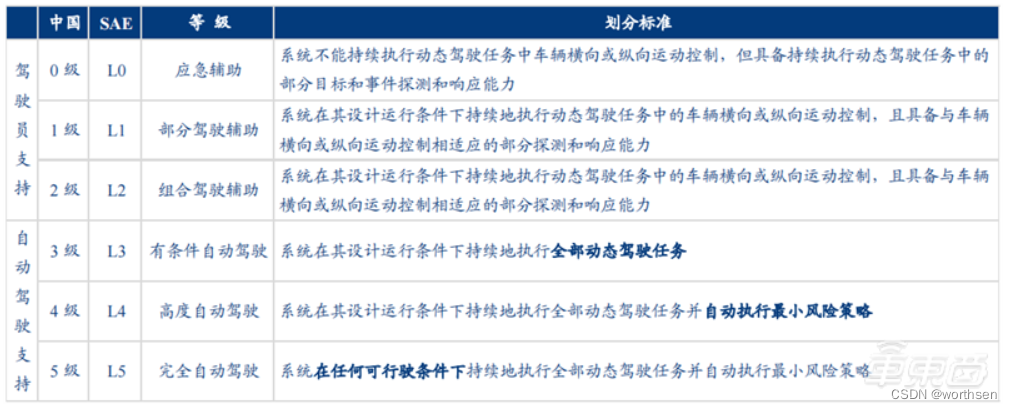
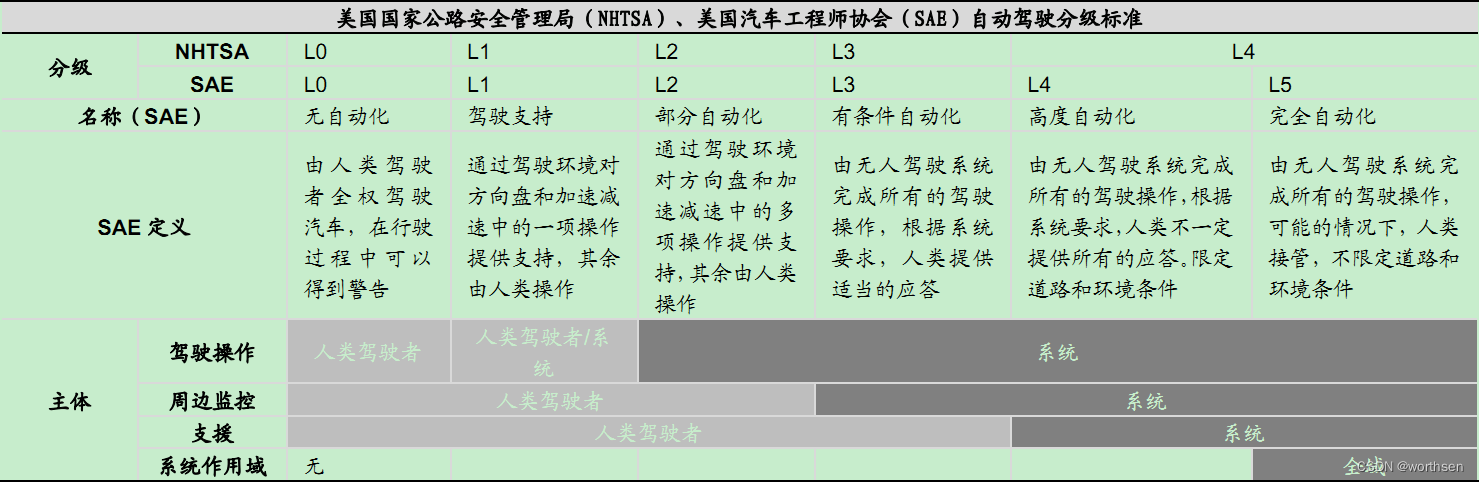
1.4 分类
| 分类 | 分级 | 责任 | 功能 |
|---|---|---|---|
| 人工驾驶 | L0 | 驾驶员 | 短暂控制 LDW(车道偏离功能) |
| 智能驾驶 | L1 | 驾驶员 | 持续控制 ACC(自适应巡航)LKA(车道保持) |
| 智能驾驶 | L2 | 驾驶员 | APA(自动泊车–在停车位处) |
| 自动驾驶 | L3 | 驾驶员 | 有条件持续驾驶 驾驶员需要干预 NGP(高速自主导航驾驶) |
| 自动驾驶 | L4 | 系统 | 有条件持续驾驶 驾驶员不干预 AVP(自动泊车–自己找停车位) |
| 自动驾驶 | L5 | 系统 | 无条件约束下自主驾驶 |
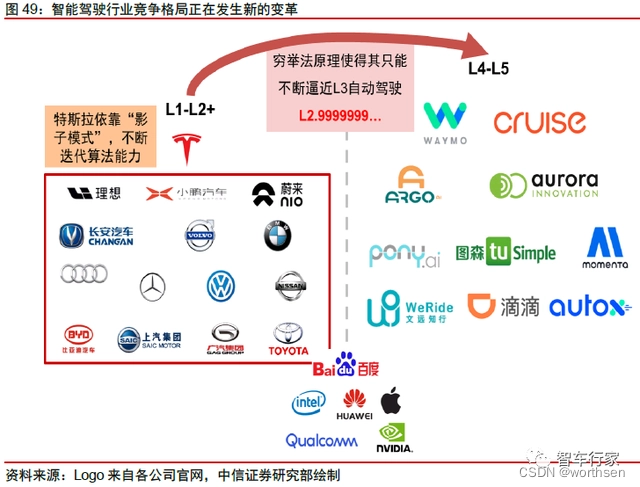
在智能驾驶路径上,越来越多的整车厂和 Tier 1 开始采用双元战略,同时研发 L2-2.5 和 L4-L5。L3 的概念偏理想化,然而技术落地相当困难。L3 曾经的先驱者奥迪也在 2019 年底放弃该计划,转而集中精力研发 L2和 L4。L2.5 是近年来提出的过渡等级,指的是增强版 L2,但主要驾驶依然由人类完成。
23年初竞争格局
1.5 顾虑
- 事故责任问题
智能驾驶模式下出的事故,责任方归车主还是汽车生厂商,需要讨论。 - 法理问题
假设,汽车行驶在桥上,往前行驶,即使急刹车也会撞到2小孩,往两侧行驶会掉到河里,遇到如下情况,如何决策,这种法理问题很难决策。 - 安全
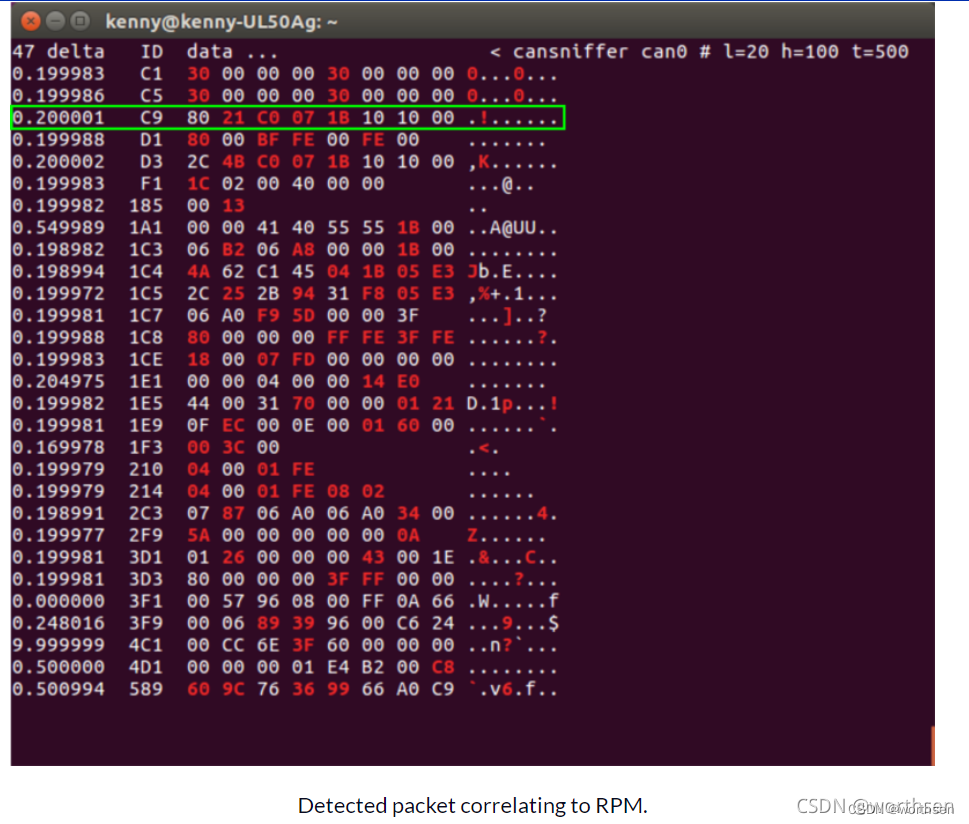
被安全攻击,can协议被破解,危险。 - 失业问题
司机下岗,大量人失业。
1.6 前景
- 根据Canalys的一份 2021 年研究报告,在美国、欧洲、日本和中国销售的新车中,约有 33% 具有 ADAS 功能。该公司还预测,到 2030 年,路上行驶的所有汽车中有 50% 将配备 ADAS。
- 根据车百智库和罗兰贝格共同发表的《顺应变革大势,拥抱创新机遇——颠覆趋势下的全球与中国汽车行业展望》报告数据,预计中国自动驾驶市场在未来将快速发展,到 2030 年中国自动驾驶车端系统市场规模将达约 5000 亿元,其中传感器、芯片和软件算法是主要贡献者,传感器市场预计到2030年将达到近1312亿元的市场规模,占自动驾驶市场整体规模达26.5%。
2 产业链现状

2.1 芯片
决策系统:核心芯片由全球科技巨头垄断,国内在崛起。
计算平台算力大幅提升,市场规模有望于 2025 年达 795 亿美元。未来随着自动驾驶级别的提高,智能汽车对车载计算平台的算力要求也逐步提高。
- 【日】瑞萨
- 【美】英特尔收购的Mobileye
- 【美】NVIDIA 的 Orin,受到蔚来、理想、小鹏等新兴造车企业青睐
- 【美】特斯拉研发了自动驾驶专用 FSD 芯片
- 【美】高通 Ride p
- 【中】华为 MDC 智能驾驶计算平台
- 【中】地平线推出征程 5 芯片,征程2在长安UNI-T、奇瑞蚂蚁、上汽智己汽车上使用
- 【中】寒武纪
2.2 仿真

3 技术路线
3.1 是否交互
3.1.1 单车智能
以谷歌 Waymo、特斯拉 Autopilot 为代表的美国技术路线,更适应美国宽阔车少的路况。
3.1.2 车路协同
以华为 V2X 车联网为代表的中国技术路线,更适应中国复杂的路况。
3.2 主传感器区分
3.2.1 纯视觉
3.2.2 混合传感器
纯视觉方案,混合传感器方案。
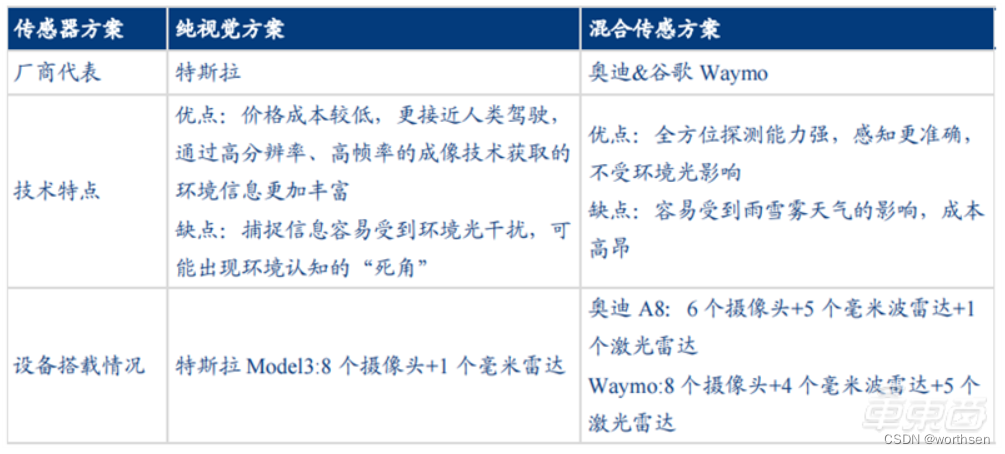
国内两种方案,都有。
3.3 前装还是后装
3.3.1 前装
出厂自带ADAS功能,是前装。
3.3.2 后装
出厂后,再自己加装ADAS功能,是后装。
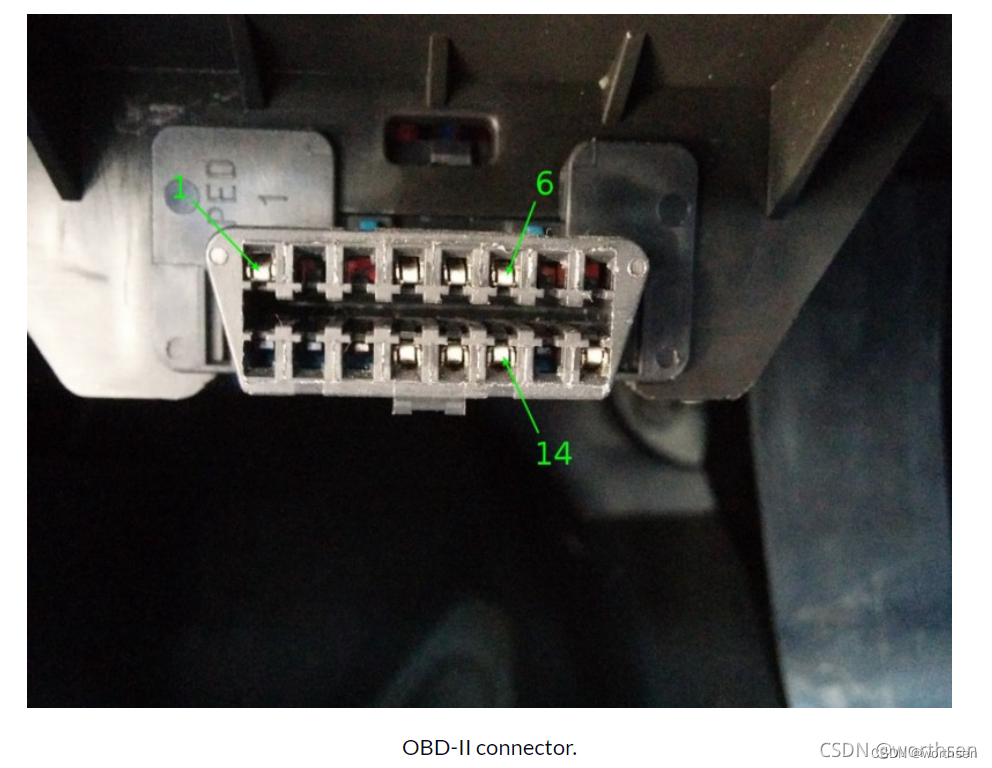
后装需要连接 OBD,同时要破解车的can协议,因为can是明文协议,好破解。
4 相关技术
最近两年,智能驾驶技术突飞猛进,已经摆脱2018年时,鱼龙混杂的局面。
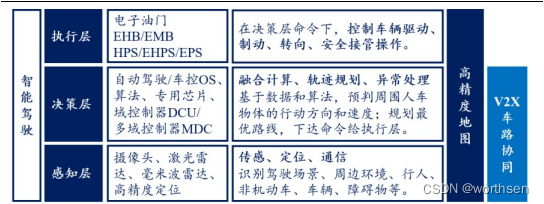
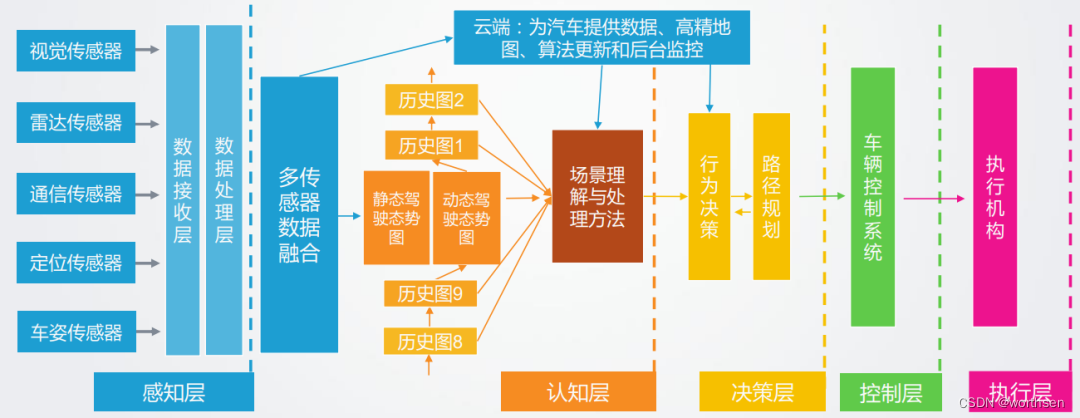
4.0 技术分类
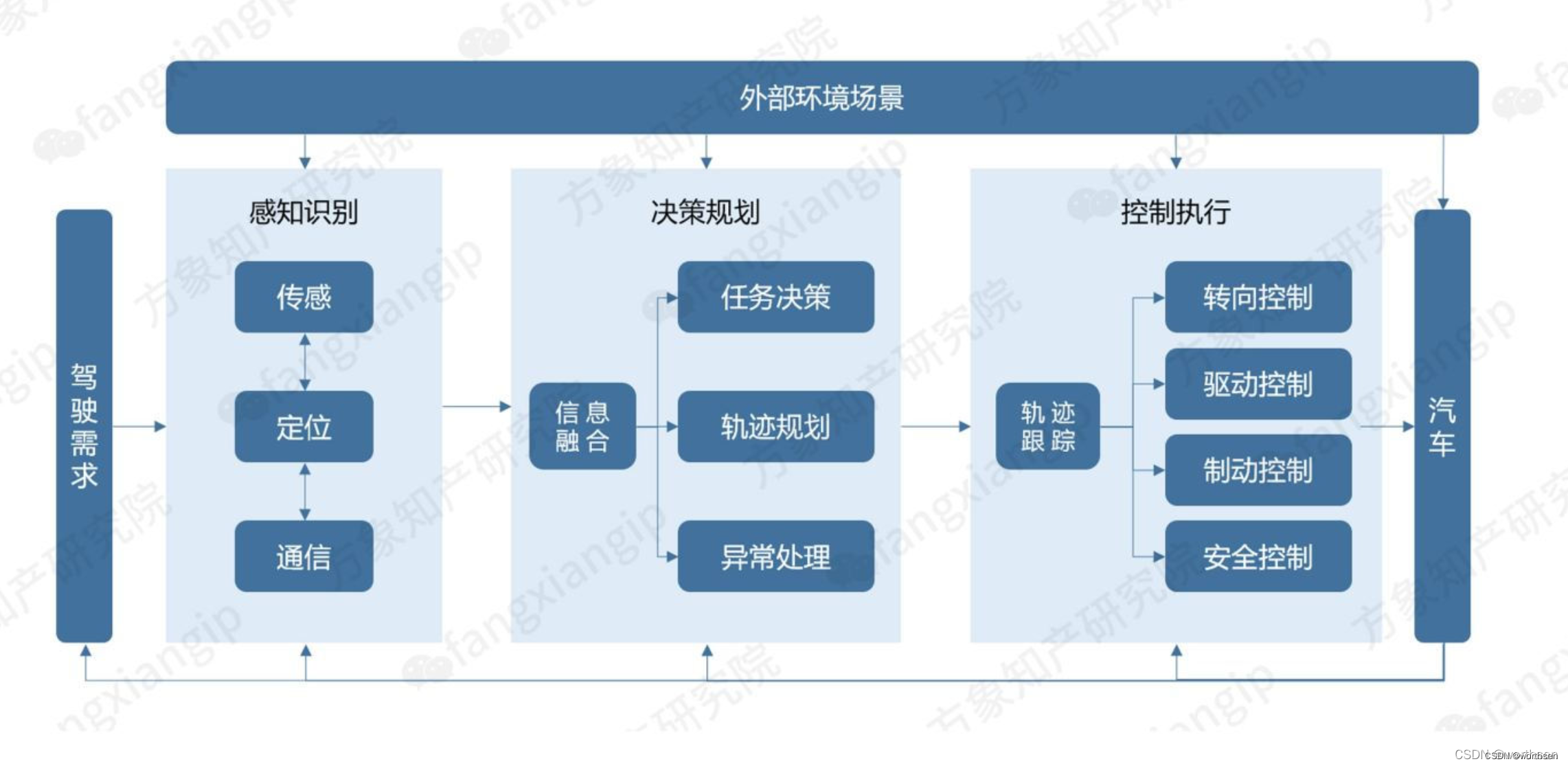
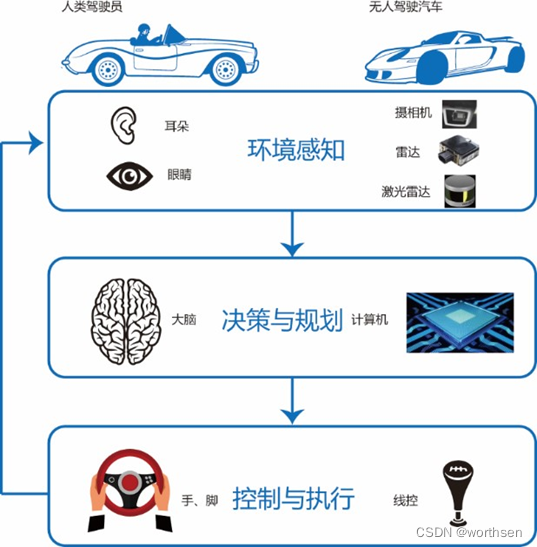
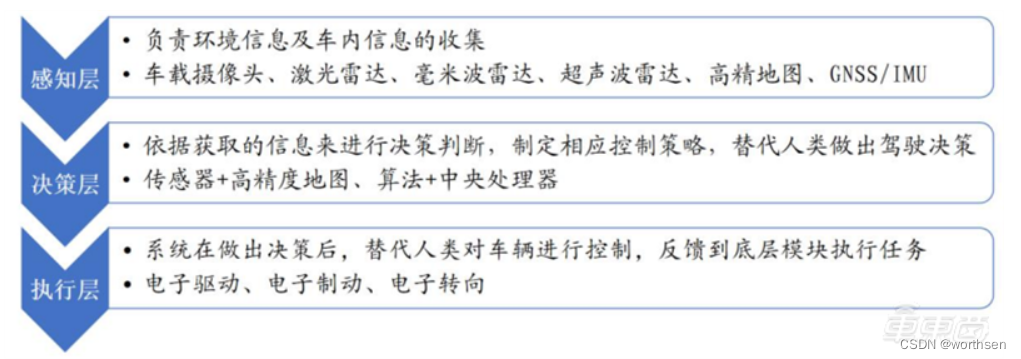
感知、决策、执行。
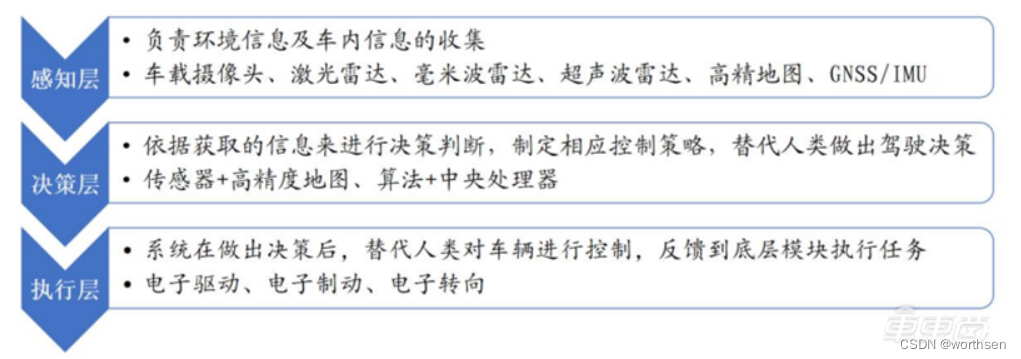
4.1 感知
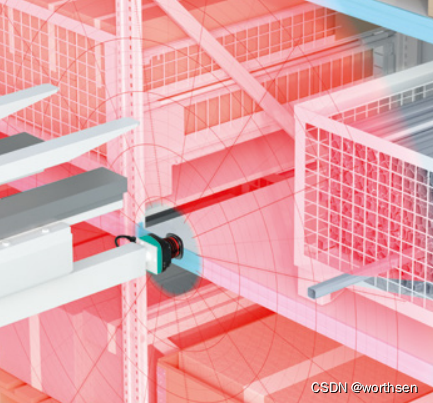
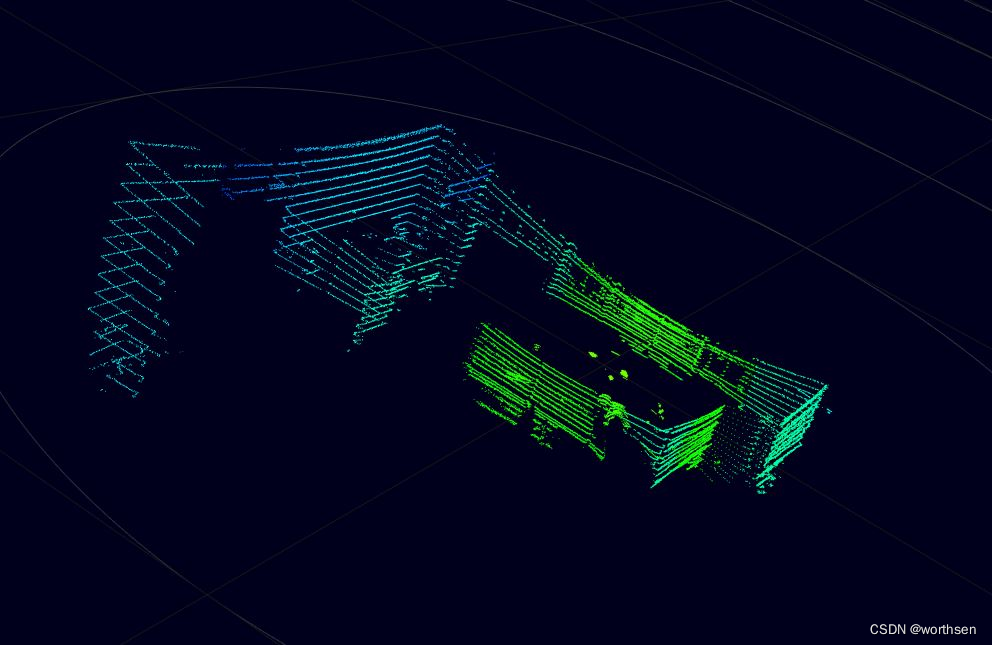
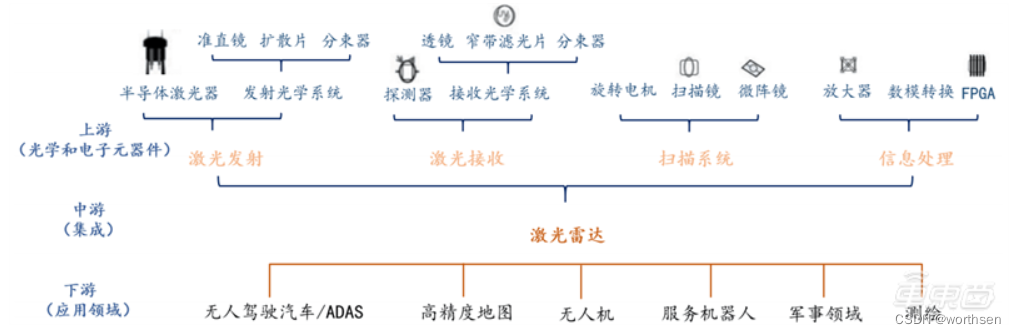
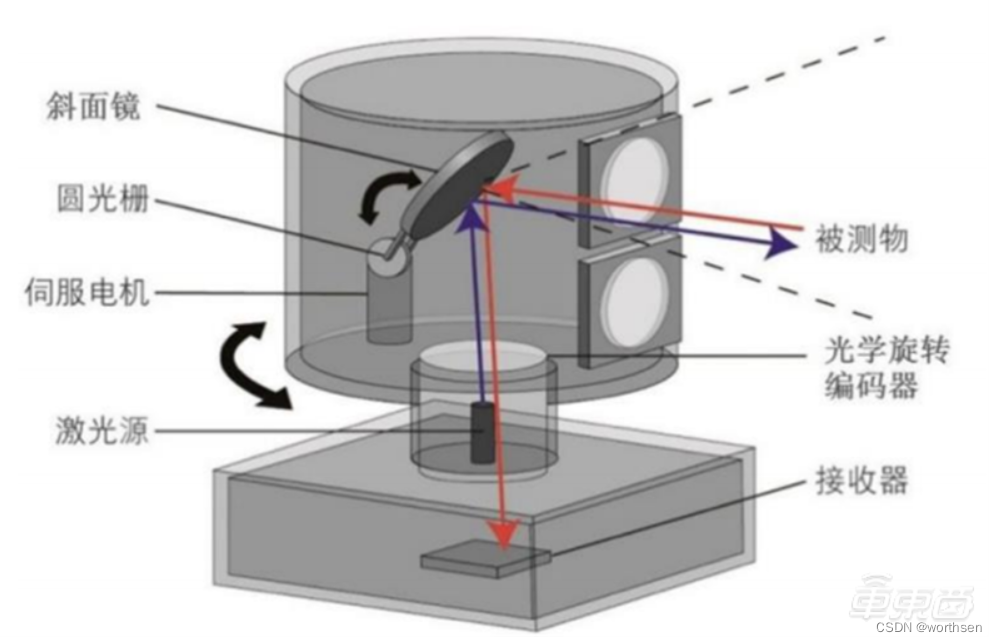
4.1.1 激光雷达
按激光线束的多少分为4线、16线、32线和64线激光雷达,线束越多,技术越难,价格越贵。17年,美国Velodyne能够产出32线和64线激光雷达,而且价格非常贵(一台Velodyne 64线产品8万美元),出货量很慢(64线雷达一个星期只能完成两台成品)。
17年,速腾,镭神智能推出16线雷达,并且价格更优。18年初,镭神16线雷达降到2.9万,随后价格逐步下降,将16线激光雷达的售价从十几万降到了如今(2023年)一万不到,极大推动智能驾驶的发展。
23年,推出雷达产品的公司有:华为、大疆、图达通、速腾、禾赛、雷神等。
-
单线
-
多线
-
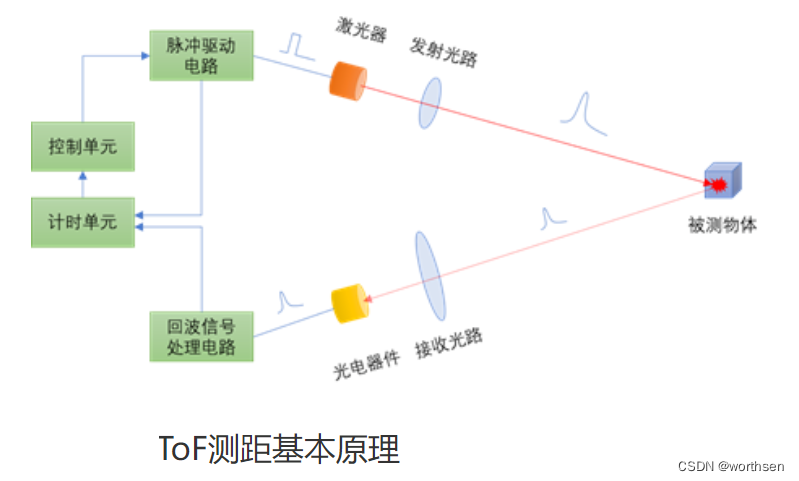
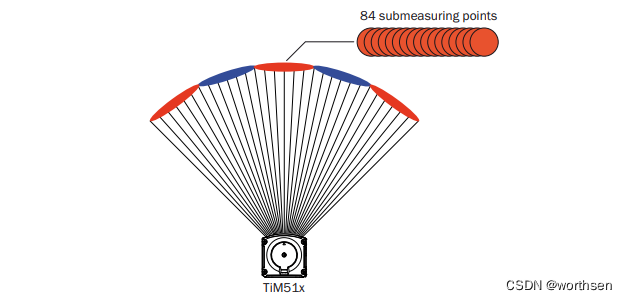
雷达lidar工作原理
4.1.2 毫米波雷达
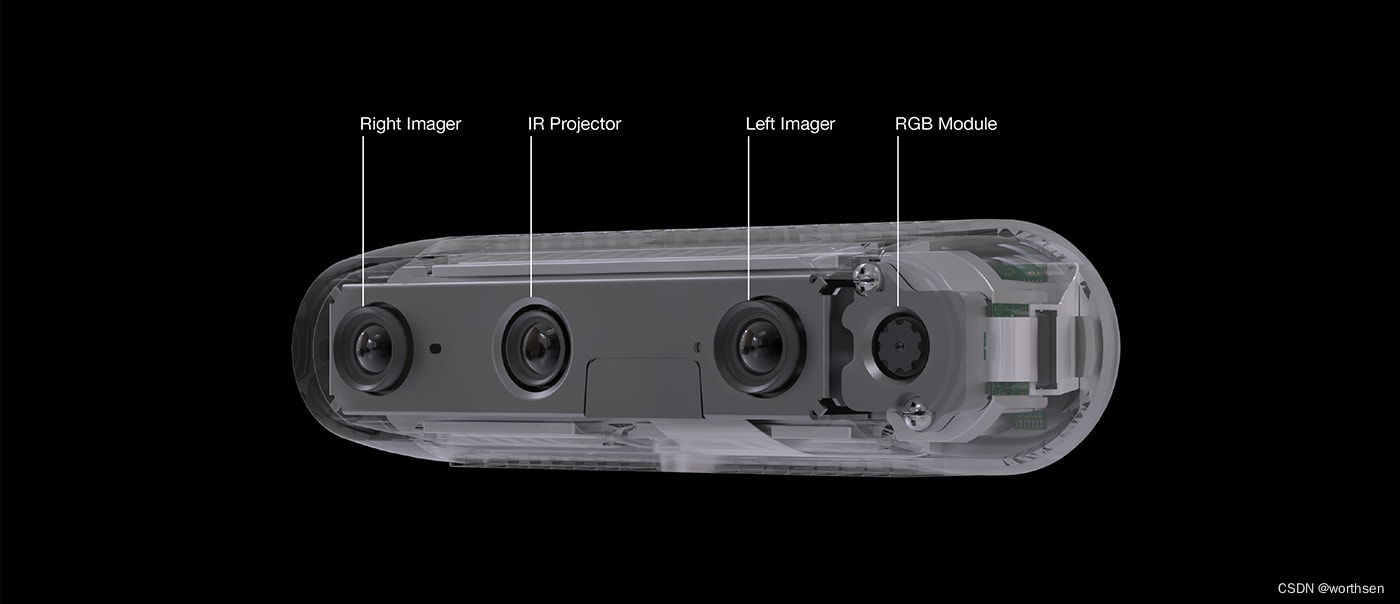
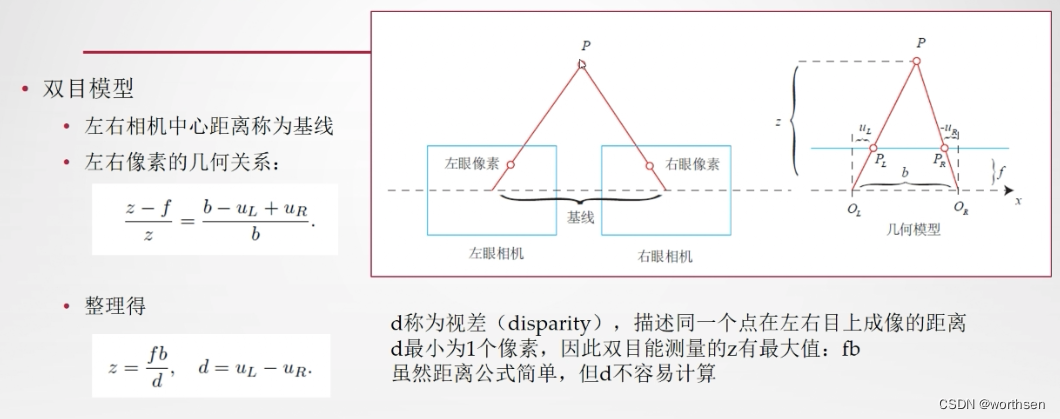
4.1.3 相机
- 单目
- 双目
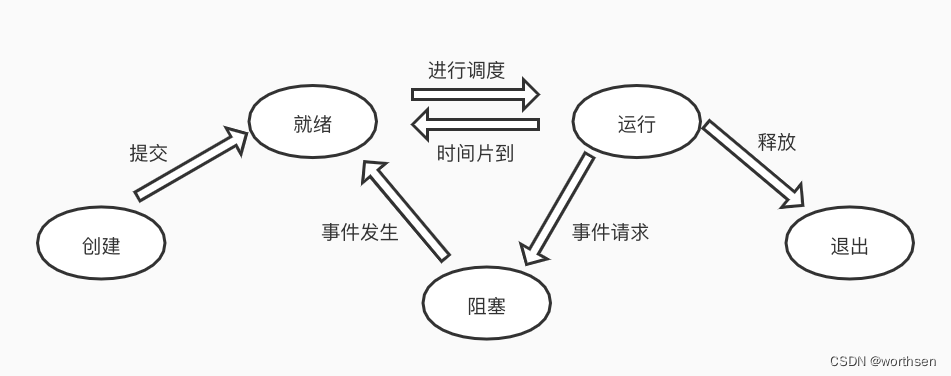
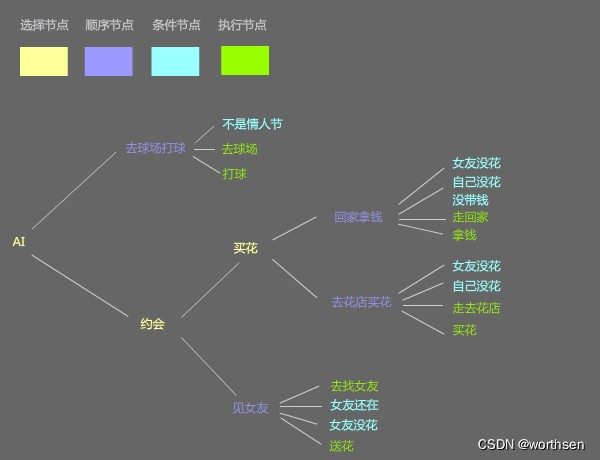
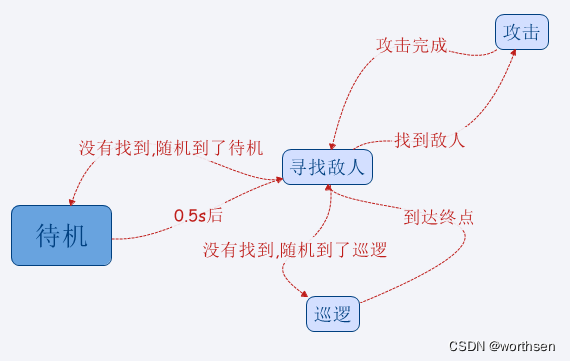
4.2 决策
- 状态机
- 行为树
4.3 执行
4.4 系统
4.4.1 操作系统简介
- 操作系统(Operating System, OS)是指控制和管理整个计算系统的硬件和软件资源, 并合理地组织调度计算机的工作和资源,以提供给用户和其他软件方便的接口和环境的 程序集合。
- 操作系统需要处理如管理与配置内存、决定系统资源供需的优先次序、控制输入设备与输出设备、操作网络与管理文件系统等基本事务。操作系统也提供一个让用户与系统交互的操作界面。
4.4.2 汽车各模块分类以及对操作系统的要求

鸿蒙诞生之前,具体鸿蒙涉及哪些,我不了解,不妄评。
分类
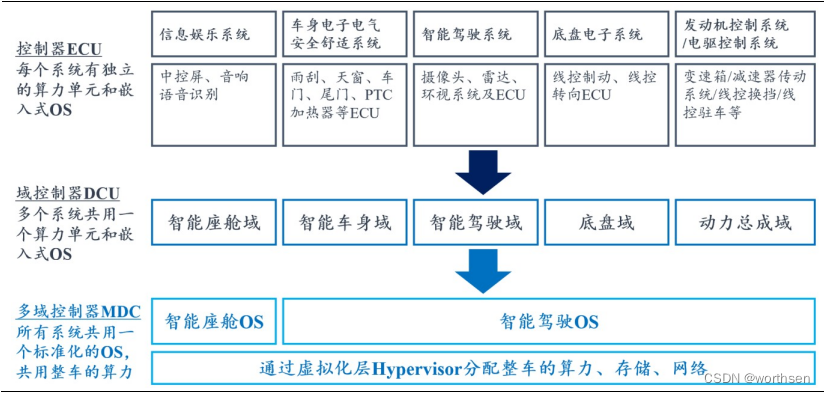
我们知道在一辆汽车上存在着上百个控制器,从发动机,变速箱,电动机,ESP,到中控大屏,车机系统,车道辅助等。根据被控对象的不同,大体可以分为两类:
- 汽车电子控制:通过直接向执行机构(如电子阀门、继电器开关、执行马达 等)发送指令,以控制发动机、变速箱、动力电池等协同工作的系统。这类系统对实时性的要求非常高,而且一般都会有功能安全等级的需求
- 车载电子设备:如仪表、中控、抬头显示(HUD)、流媒体后视镜等。这类系统 常与用户体验相关,不直接参与汽车行驶的控制决策,对车辆行驶性能和安全影响较小
要求
由于两者对实时性要求的差异,操作系统逐步演化出了两种类型,Real Time Operating System,简称RTOS,与Time-sharing Operating System的分时操作系统。
- 常见的RTOS如:Ucos,Free Rtos等。
- 分时系统:PC常用的系统就是
4.x ROS(Apollo)
- ROS(Robot Operating System,下文简称“ROS”)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。目前ROS主要支持Ubuntu。
- 因为ROS包含了很多东西,ADAS开发会用到。又因为ROS主要支持ubuntu,ubuntu又不是车规级系统,要么自己构建一套类似ROS的系统,要么设计一套API来桥接到新的系统上。
- 国内最著名的就是百度重金打造的Apollo(阿波罗)。
历程
从2015年开始,百度大规模投入无人车技术研发。
2016年9月获得美国加州自动驾驶路测牌照,11月在浙江乌镇开展普通开放道路的无人车试运营。
2017年7月,将率先开放封闭场地的自动驾驶能力,年底输出在城市简单路况下的自动驾驶能力。
2018年1月8日下午,在拉斯维加斯举办的BAIDU WORLD发布会上,百度正式推出了旗下第二代自动驾驶平台Apollo 2.0。
2018年2月15日,Apollo无人车亮相2018年中央电视台春节联欢晚会广东珠海分会场。在春晚直播中,百余辆Apollo无人车跨越港珠澳大桥。
2018年4月19日,百度Apollo开放平台正式发布Apollo2.5版本。Apollo2.5支持限定区域视觉高速自动驾驶,“解锁”高速公路场景。提到高速公路,发布会现场演示了长沙智能驾驶研究院有限公司利用Apollo2.5,快速实现高速公路场景下重型卡车自动驾驶的案例。百度方面表示,这意味着Apollo新增卡车物流应用场景,再度扩宽了其商业化想象空间。
2018年7月4日,在Baidu Create 2018百度AI开发者大会上,百度发布Apollo3.0。
Apollo已经开放了超过22万行代码,超过1万名开发者推荐使用Apollo的开放代码,生态合作伙伴规模达到116家。面向量产,Apollo发布了自主泊车(Valet Parking)、无人作业小车(MicroCar)、自动接驳巴士(MiniBus)三套自动驾驶解决方案,帮助开发者及合作伙伴三个月内即可打造出属于自己的“阿波龙”。基于Apollo自主泊车解决方案,百度已联合盼达用车实现了中国首次自动驾驶共享汽车示范运营,并联合现代汽车展开定点接驳的落地应用。
2018年7月10日,百度(NASDAQ:BIDU)与宝马集团宣布合作 。
2019年1月,百度在拉斯维加斯举行的2019CES(消费电子展)上宣布,全球首个最全面智能驾驶商业化解决方案Apollo Enterprise正式问世。百度Apollo3.5发布,可支持复杂城市道路自动驾驶,并发布了全球首个面向自动驾驶的高性能开源计算框架Apollo Cyber RT。
2019年,100辆自动驾驶出租车将在湖南长沙130英里的城市道路上行驶,配备百度的V2X技术。这支车队将成为中国第一批自主驾驶出租车,由百度的V2X系统管理。
2020年4月,百度 Apollo 正式对外发布“ACE 交通引擎”并完整介绍百度“ACE 交通引擎”的《Apollo 智能交通白皮书》。百度“ACE 交通引擎”综合解决方案已在北京、长沙、保定等10余个城市落地实践。百度“ACE交通引擎”具体是指:Autonomous Driving、Connected Road、Efficient Mobility,即自动驾驶、车路协同、高效出行。
2020年7月30日,百度与伟创力,在伟创力苏州吴中工厂举行了Apollo Computing Unit (ACU)量产下线发布仪式。发布会上,百度宣布全球首个量产自动驾驶计算平台ACU正式下线。
2020年9月10日,百度Apollo宣布在北京正式开放自动驾驶出租车服务Apollo Go,北京用户可以在百度地图及Apollo官网上预约体验Robotaxi。北京此次开放的自动驾驶载人测试区域总长度约700公里,覆盖亦庄、海淀、顺义的生活圈和商业圈等近百个站点,全国开放区域最广、测试里程最长。
2021年9月27日,世界互联网大会乌镇峰会在浙江乌镇召开,Apollo“汽车机器人”(阿波罗)在会上发布。
2021年11月25日,百度Apollo获国内首个自动驾驶收费订单,这标志着自动驾驶正迎来“下半场”——商业化运营阶段。
2022年2月14日,萝卜运力(深圳)科技有限公司获批深圳市智能网联汽车示范应用。

4.x 车路协同
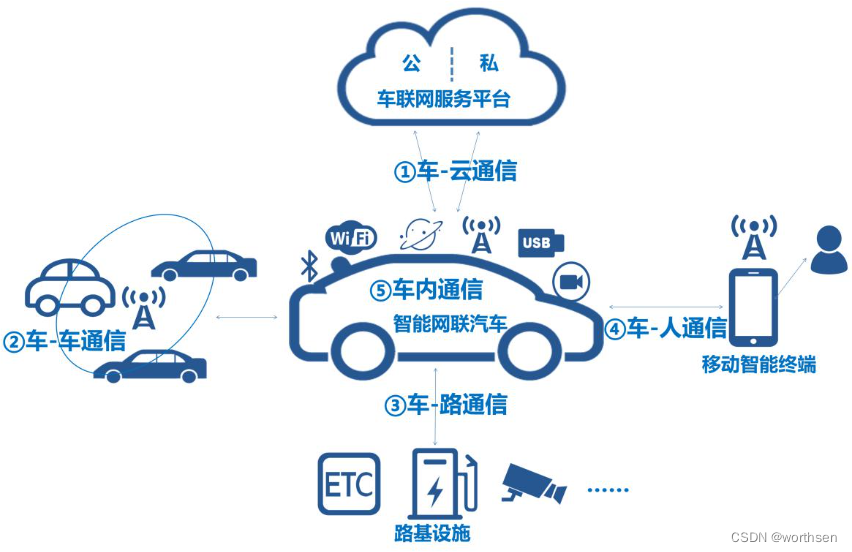
V2X 车联网(以下简称 V2X,Vehicle to Everything)是借助新一代信息和通信技术,实现车内、车与车 V2V、车与路 V2I、车与人 V2P、车与服务平台 V2C 的全方位数据交互,构成交通参与要素的全连接。V2X 车联网由三部分组成:智慧的路、聪明的车和应用服务新业态。
4.x 智能座舱
4.x 车载以太网
需求
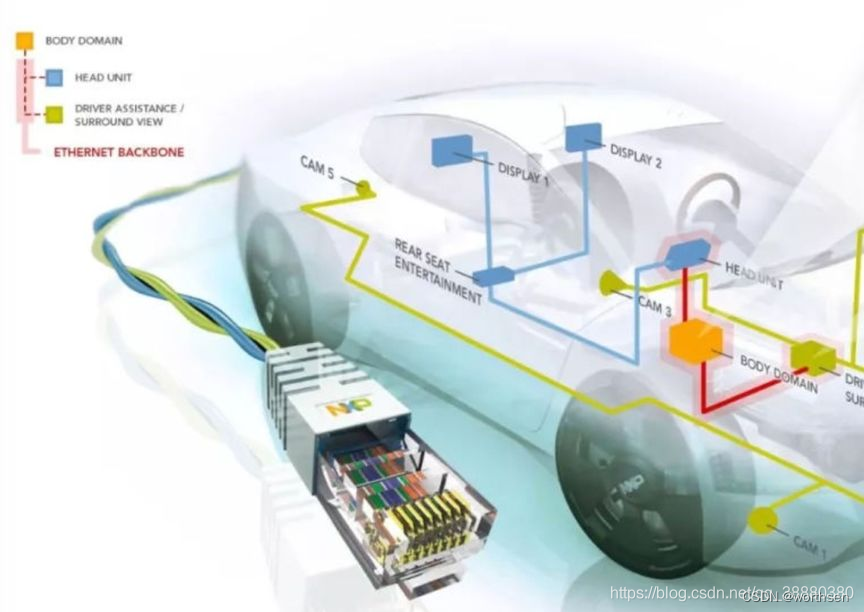
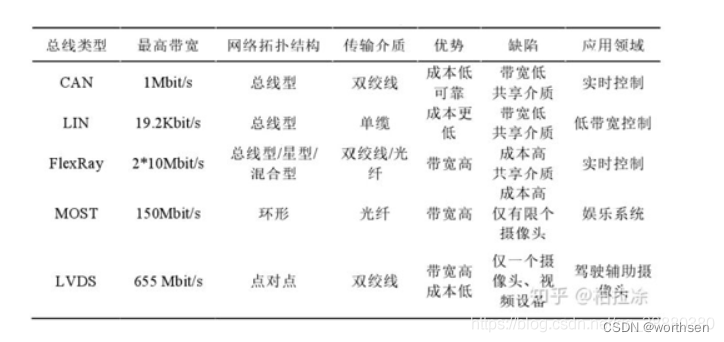
如今汽车越来越智能,当汽车中需要LIDAR、RADAR、摄像头和 V2X 设备等,以往的车载总线技术带宽不能满足,由此催生了车载以太网。
车载以太网是在汽车中连接电子元器件的一种有线网络。其设计初衷是希望满足汽车行业对带宽、延迟、同步、干扰(例如 电磁干扰(EMI))、安全性和网络管理等方面的要求。车载以太网的概念最初是由 Broadcom 提出的,后来 OPEN(单对以太网)联盟采纳了这一标准并承担起管理职责。OPEN 推广 Broadcom 的 100 Mbps BroadR-Reach 作为多供应商许可解决方案。100 Mbps PHY 实施借鉴了 1 Gbps 以太网的技术,能够在一对线缆上实现 100 Mbps 双向传输。此技术使用了更先进的编码方案,可以消除回声,将基本频率(从 125 MHz)降至 66 MHz。
线束
汽车中就重量和成本而言,连接汽车各系统的线束在所有汽车部件中排名第三。

一辆低端车的线束系统成本只要大约300美元,重量大约30公斤,长度大约1500米,线束大约600根,1200个接点。而目前一辆豪华车的线束系统成本大约550-650美元,重量大约60公斤,线束大约1500根,长度大约5000米,3000个接点。如果沿用目前的电子架构体系,无人车时代的线束成本不会低于1000美元,重量可达100公斤。车载以太网使用单对非屏蔽电缆以及更小型紧凑的连接器,使用非屏蔽双绞线时可支持15m的传输距离(对于屏蔽双绞线可支持40m),这种优化处理使车载以太网可满足车载EMC要求。可减少高达80%的车内连接成本和高达30%的车内布线重量。100M车载以太网的PHY采用了1G以太网的技术,可通过使用回声抵消在单线对上实现双向通信。
4.x HUD
HUD,Heads Up Display,也称抬头显示系统,是一种综合的电子显示设备,可以将行车信息如导航、车速、电量/油量、ADAS相关信息等投射到前挡风玻璃或其他显示介质上,使驾驶员不用低头便可以看到这些信息,提高了驾驶舒适性和安全性。

HUD起源于航空领域,1988年通用首次引入汽车领域,但是发展一直不温不火,2020年奔驰S级搭载AR-HUD,掀起了HUD上车热潮。

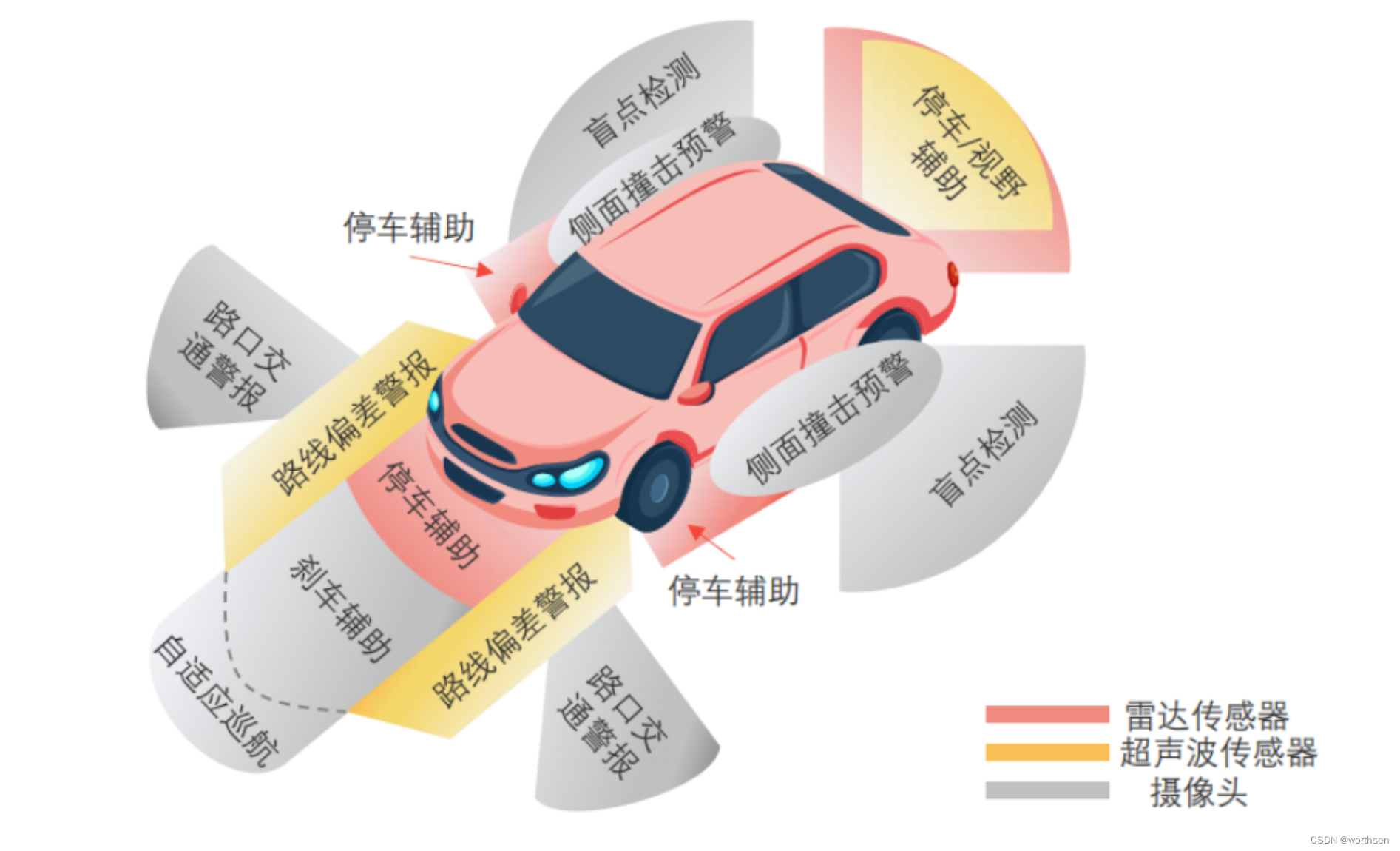
5 具体功能
车道偏离预警系统LDWS( Lane departure warning system)
行车中未打转向灯突然大幅度偏离车道,不正常偏移时,行车记录仪一旦判定行驶路线有异,便会以行车记录仪的显示屏幕提醒驾驶人,并发出声响警告对司机进行警示。这将使司机可以马上采取行动,回到原行车道上。

车道保持辅助系统LKS (Lane Keeping System)
它可以在车道偏离预警系统(LDWS)的基础上对刹车的控制协调装置进行控制。对车辆行驶时借助一个摄像头识别行驶车道的标识线将车辆保持在车道上提供支持。可检测本车在车道内的位置,并可自动调整转向,使本车保持在车道内行驶。
自适应巡航系统ACC(Adaptive Cruise Control)
如果车辆前方畅通,自适应巡航(ACC)将保持设定的最大巡航速度向前行驶。如果检测到前方有车辆,自适应巡航(ACC) 将根据需要降低车速,与前车保持基于选定时间的距离,直到达到合适的巡航速度。自适应巡航也可称为主动巡航,类似于传统的定速巡航控制,该系统包括雷达传感器、数字信号处理器和控制模块。
前碰撞预防系统FCW (Forward Collision Warning)
通过雷达系统来时刻监测前方车辆,判断本车与前车之间的距离、方位及相对速度,当存在潜在碰撞危险时对驾驶者进行警告。FCW系统本身不会采取任何制动措施去避免碰撞或控制车辆。
自动泊车系统APA(Automatic Parking Assist)
利用车载传感器(一般为超声波雷达或摄像头)识别有效的泊车空间,并通过控制单元控制车辆进行泊车。相比于传统的倒车辅助功能,如倒车影像以及倒车雷达,自动泊车的功能智能化程度更高,有效的减轻了驾驶员的倒车困难。

全景式监控影像系统AVM(Around View Monitor)
多个广角相机拍摄图像后,经过去畸变弥合后呈现出 360 全景影像。超级实用的功能。

盲点监测系统BSD( Blind Spot Detection)
驾驶员疲劳预警系统DFM(Driver Fatigue Monitor System)
通过摄像头获取的图像,通过视觉跟踪、目标检测、动作识别等技术对驾驶员的驾驶行为及生理状态进行检测,当驾驶员发生疲劳、分心、打电话、抽烟等危险情况时在系统设定时间内报警以避免事故发生。

自适应灯光控制ALC(Adaptive Light Control)
通过感知驾驶员操作、车辆行驶状态、路面变化以及天气环境等信息,AFS自动控制前照灯实时进行上下、左右照明角度的调整,为驾驶员提供最佳道路照明效果。
18年4月,用双目相机在昆山拍的视频。用的奇瑞捷途x70。

附图一张,车载逆变器



6 ADAS汽车
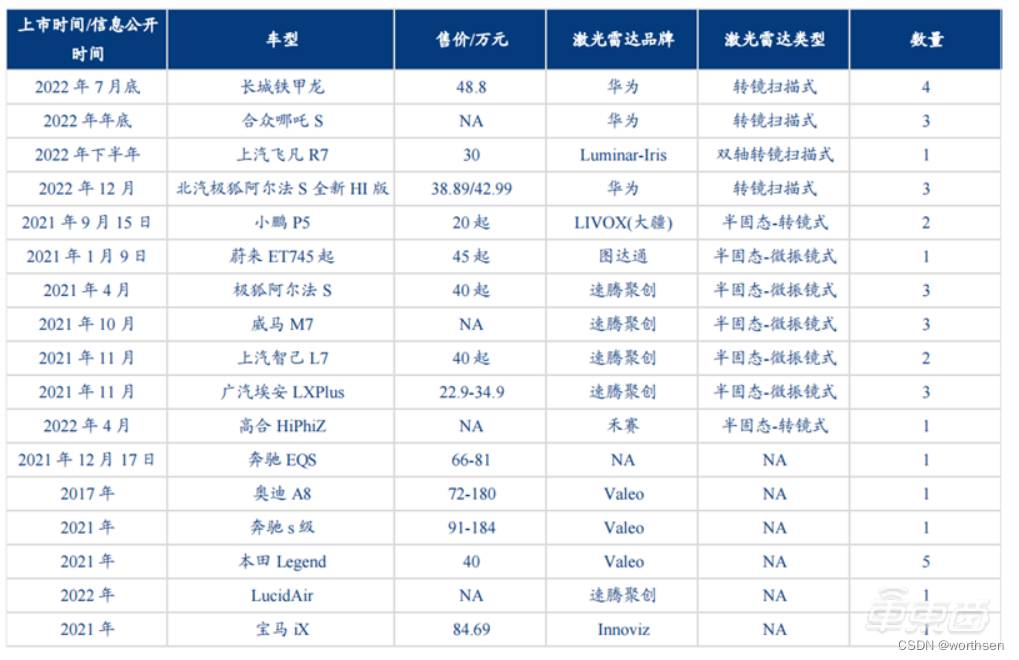
截至23年年初,已经有很多车有了低阶的ADAS系统,新能源汽车基本都有,国产的传统新款油车也基本都有。
功能多一些的中高级汽车,可见如下表。
参考
1、百科–无人驾驶
2、百科–智能驾驶
3、wiki–adas
4、智能驾驶的商业化应用及趋势
5、自动驾驶带火激光雷达!出货量十年翻百倍,华为、大疆杀入
6、自动驾驶传感器之摄像头(十三)ADAS摄像头分类及车身安装位置
7、车载HUD,投出一片新天地
8、《智能汽车决战2020》
9、《自动驾驶改变未来》
11、机器人介绍、应用、前景
12、ADAS图解
13、逆变器的介绍
14、如何破解汽车–CAN协议
15、系统–车载系统
16、机器人开发–Apollo ROS介绍
17、ROS–资料汇总
18、以太网–车载以太网
19、一文读懂ADAS八大功能
20、智能驾驶报告:感知、决策、执行产业链迎机遇
21、Pr视频剪辑软件使用小结
22、zdksii
23、常熟即将走入“无人时代”